
目录
快速导航-
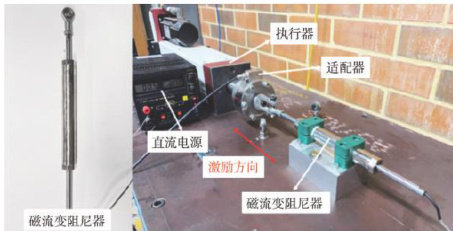
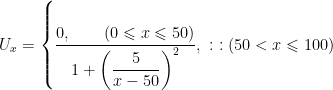
封面文章 | 磁流变阻尼器唯象模型及其半主动控制研究
封面文章 | 磁流变阻尼器唯象模型及其半主动控制研究
-
研究论文 | 基于模糊综合评价法的全风化花岗岩抗剪强度参数取值研究
研究论文 | 基于模糊综合评价法的全风化花岗岩抗剪强度参数取值研究
-

研究论文 | 基于近震体波走时的辽宁地区速度结构研究
研究论文 | 基于近震体波走时的辽宁地区速度结构研究
-
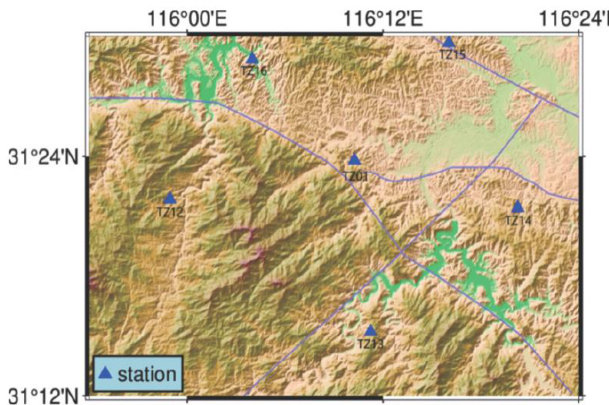
研究论文 | 利用远震接收函数分析安徽霍山地区地壳结构
研究论文 | 利用远震接收函数分析安徽霍山地区地壳结构
-

研究论文 | 地震诱发储罐爆炸与区域损伤概率分布
研究论文 | 地震诱发储罐爆炸与区域损伤概率分布
-
研究论文 | 考虑人员疏散的城市“平急两用”地库应急储备策略研究
研究论文 | 考虑人员疏散的城市“平急两用”地库应急储备策略研究
-
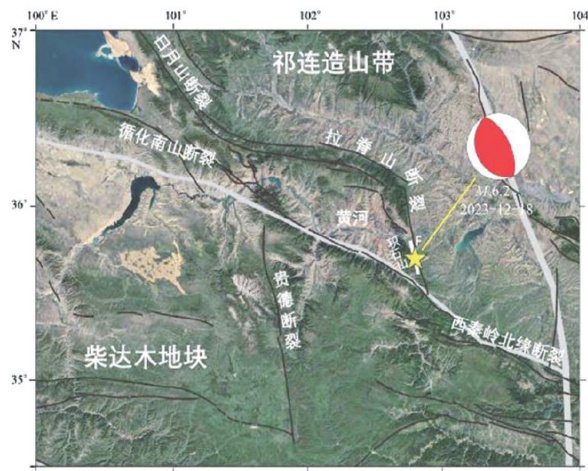
案例研究 | 积石山 Ms6.2 地震震中村镇房屋震害及次生灾害泥流特征分析
案例研究 | 积石山 Ms6.2 地震震中村镇房屋震害及次生灾害泥流特征分析
-
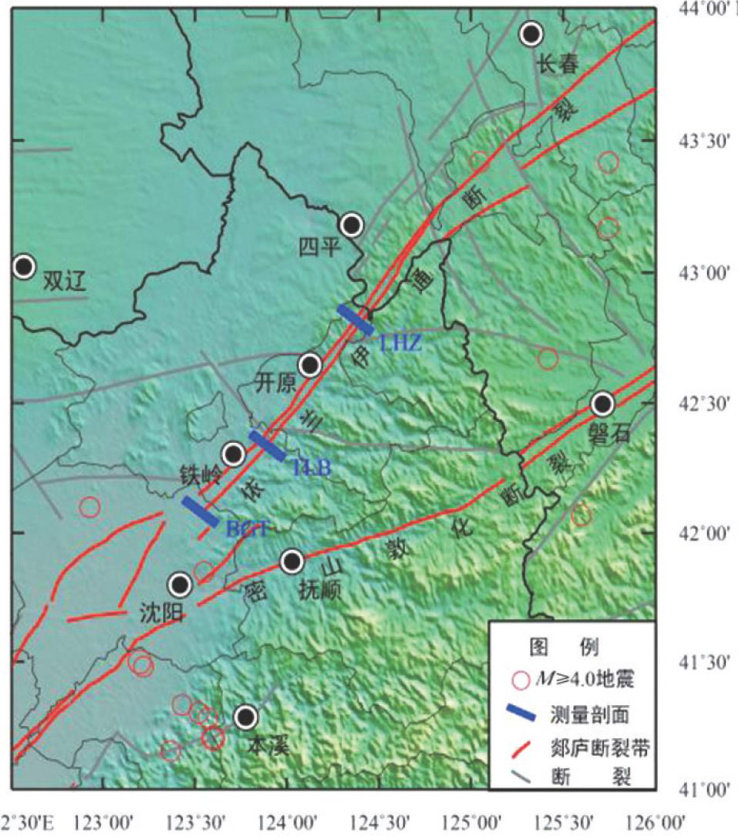
案例研究 | 依兰一伊通断裂带沈阳一四平段气体释放特征研究
案例研究 | 依兰一伊通断裂带沈阳一四平段气体释放特征研究
-

案例研究 | 辽宁普兰店M4.6地震沈阳棋盘山气氢变化特征
案例研究 | 辽宁普兰店M4.6地震沈阳棋盘山气氢变化特征
-
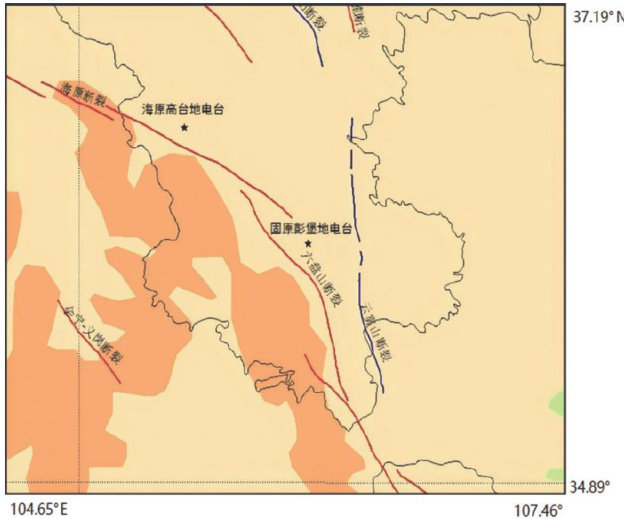
案例研究 | 基于青藏块体强震背景的宁南地区地电阻率变化特征对比分析
案例研究 | 基于青藏块体强震背景的宁南地区地电阻率变化特征对比分析
-
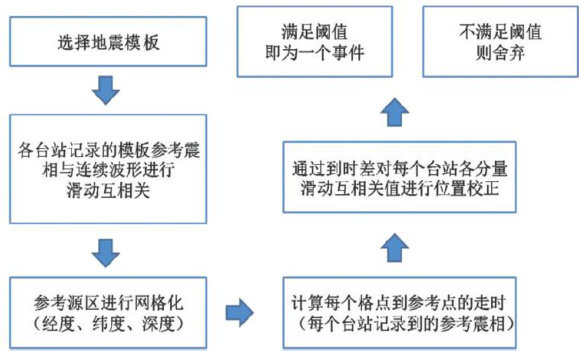
案例研究 | 利用模板匹配定位方法检测康平地区非天然微震
案例研究 | 利用模板匹配定位方法检测康平地区非天然微震
-
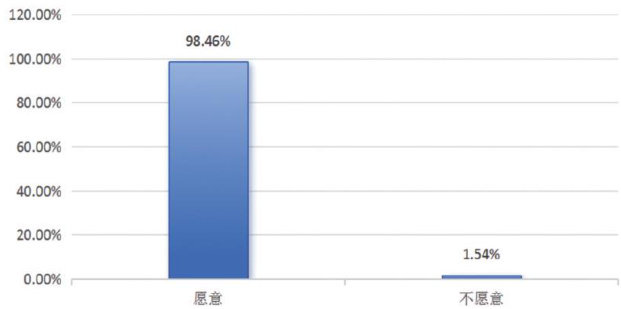
动态与信息 | 辽宁省地震高风险区中小学生防震减灾科普知识现状调查研究
动态与信息 | 辽宁省地震高风险区中小学生防震减灾科普知识现状调查研究






 登录
登录