
目录
快速导航-
第二十八届中国科协年会学术论文专题——年规芯片架构改进与可靠性优化关键技术 | 基于国产车规MCU的AUTOSARMCAL架构改进与实现
第二十八届中国科协年会学术论文专题——年规芯片架构改进与可靠性优化关键技术 | 基于国产车规MCU的AUTOSARMCAL架构改进与实现
-
第二十八届中国科协年会学术论文专题——年规芯片架构改进与可靠性优化关键技术 | 基于先进工艺的车载芯片可靠性优化设计
第二十八届中国科协年会学术论文专题——年规芯片架构改进与可靠性优化关键技术 | 基于先进工艺的车载芯片可靠性优化设计
-
第二十八届中国科协年会学术论文专题——年规芯片架构改进与可靠性优化关键技术 | SiCMOSFETs在温度冲击试验中的失效原因研究
第二十八届中国科协年会学术论文专题——年规芯片架构改进与可靠性优化关键技术 | SiCMOSFETs在温度冲击试验中的失效原因研究
-
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | 激光雷达感知与自动驾驶多模态3D目标检测技术专题
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | 激光雷达感知与自动驾驶多模态3D目标检测技术专题
-
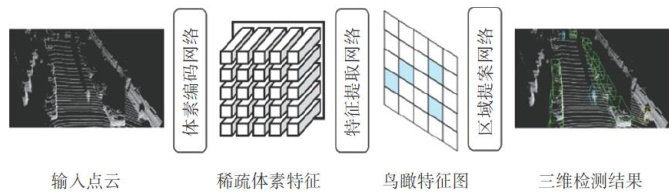
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | 基于改进PointPillars的激光雷达三维目标检测算法
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | 基于改进PointPillars的激光雷达三维目标检测算法
-
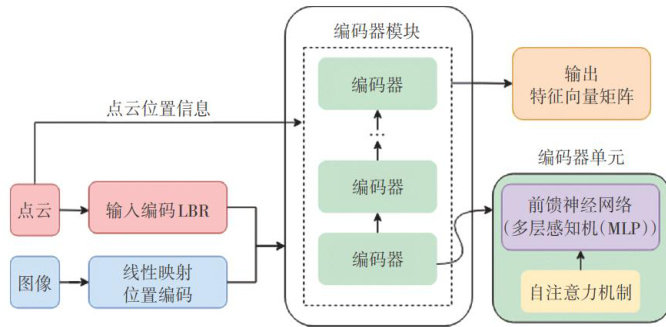
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | 基于改进Transformer-无迹卡尔曼滤波器的智能车辆多模态3D目标检测方法
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | 基于改进Transformer-无迹卡尔曼滤波器的智能车辆多模态3D目标检测方法
-
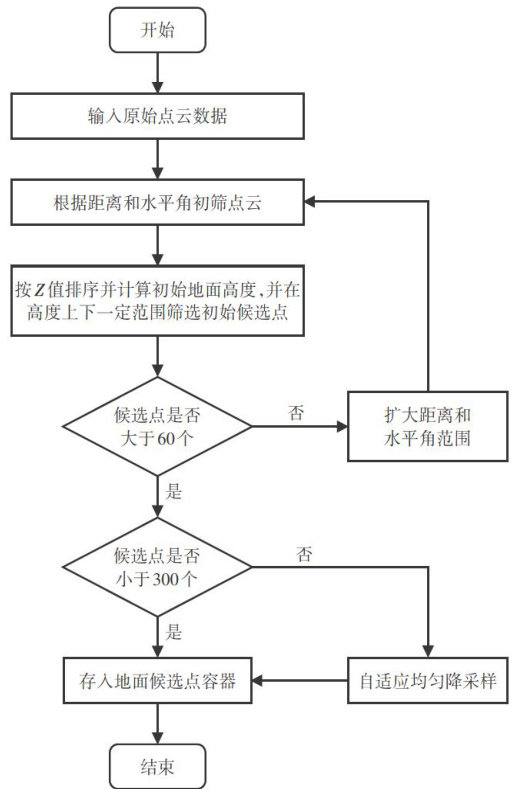
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | 基于地面拟合与DBSCAN聚类的激光点云去噪算法研究
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | 基于地面拟合与DBSCAN聚类的激光点云去噪算法研究
-
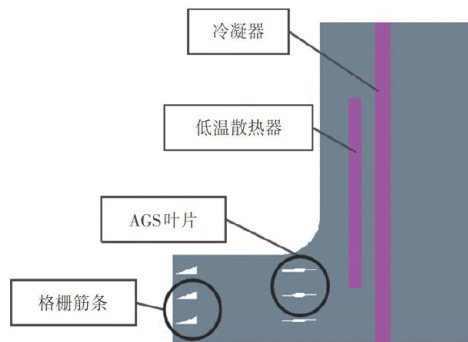
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | AGS布置形式对前舱散热性能及空调能耗的影响研究
激光雷达感知与自动驾驶多模态3D目标检测技术专题 | AGS布置形式对前舱散热性能及空调能耗的影响研究











 登录
登录